طراحی در زیر مورد بحث قرار گرفته است تعلیق مغناطیسینیکولایف، که استدلال کرد که می توان از حرکت یک آهنربای دائمی بدون توقف اطمینان حاصل کرد. آزمایشی برای آزمایش عملکرد این مدار نشان داده شده است.
خود آهنرباهای نئودیمیم در این فروشگاه چینی به فروش می رسد.
شناور مغناطیسی بدون مصرف انرژی - فانتزی یا واقعیت؟ آیا می توان یک بلبرینگ مغناطیسی ساده ساخت؟ و نیکولایف واقعاً در اوایل دهه 90 چه چیزی را نشان داد؟ بیایید به این سوالات نگاه کنیم. هرکسی که تا به حال یک جفت آهنربا را در دستان خود نگه داشته است، احتمالاً از خود پرسیده است: "چرا نمی توانم یک آهنربا را بدون پشتیبانی بیرونی بالای دیگری شناور کنم؟ با دارا بودن میدان مغناطیسی ثابت، توسط قطب هایی به همین نام کاملاً بدون مصرف انرژی دفع می شوند. این یک پایه عالی برای خلاقیت فنی است! اما به این سادگی نیست.
در قرن نوزدهم، دانشمند بریتانیایی Earnshaw ثابت کرد که تنها با استفاده از آهنرباهای دائمی، نمی توان یک جسم معلق را در میدان گرانشی به طور پایدار نگه داشت. شناور جزئی یا به عبارتی شبه معلق فقط با پشتیبانی مکانیکی امکان پذیر است.
چگونه یک سیستم تعلیق مغناطیسی بسازیم؟
یک تعلیق مغناطیسی ساده را می توان در چند دقیقه ساخت. برای ساختن یک پایه نگهدارنده به 4 آهنربا در پایه و یک جفت آهنربا متصل به خود جسم معلق نیاز دارید که مثلاً می تواند یک قلم نمدی باشد. بنابراین، ما یک ساختار شناور با تعادل ناپایدار در دو طرف محور قلم نمدی به دست آوردیم. یک توقف منظم مکانیکی به تثبیت موقعیت کمک می کند.
ساده ترین سیستم تعلیق مغناطیسی با توقف
این طرح را می توان به گونه ای پیکربندی کرد که وزن اصلی جسم معلق روی آهنرباهای نگهدارنده قرار گیرد و نیروی رانش جانبی آنقدر کم باشد که اصطکاک مکانیکی در آنجا عملاً به صفر نزدیک شود.
اکنون منطقی است که سعی کنیم توقف مکانیکی را با یک مغناطیسی جایگزین کنیم تا بتوانیم به حرکت مغناطیسی مطلق دست یابیم. اما، متأسفانه، نمی توان این کار را انجام داد. شاید به دلیل ابتدایی بودن طراحی باشد.
طراحی جایگزین
بیایید بیشتر در نظر بگیریم سیستم قابل اعتمادچنین تعلیقی از آهنرباهای حلقه ای به عنوان استاتور استفاده می شود که از طریق آن محور چرخش بلبرینگ عبور می کند. به نظر می رسد که در یک نقطه خاص، آهنرباهای حلقه ای دارای خاصیت تثبیت آهنرباهای دیگر در امتداد محور مغناطیسی خود هستند. ولی بقیه اش همینطوره هیچ تعادل پایداری در امتداد محور چرخش وجود ندارد. این باید با یک توقف قابل تنظیم از بین برود.
بیایید ساختار سفت تری را در نظر بگیریم.
شاید در اینجا بتوان محور را با استفاده از یک آهنربای پایدار تثبیت کرد. اما حتی در اینجا نیز رسیدن به تثبیت ممکن نبود. ممکن است لازم باشد آهنرباهای رانش را در دو طرف محور چرخش یاتاقان قرار دهید. ویدیویی با بلبرینگ مغناطیسی نیکولایف برای مدت طولانی در اینترنت مورد بحث قرار گرفته است. کیفیت تصویر این امکان را به ما نمی دهد که این طرح را با جزئیات بررسی کنیم و به نظر می رسد که او تنها با کمک آهنرباهای دائمی توانسته به شناور پایدار دست یابد. در این مورد، نمودار دستگاه با آنچه در بالا نشان داده شده است یکسان است. فقط یک توقف مغناطیسی دوم اضافه شده است.
بررسی طراحی گنادی نیکولایف.
ابتدا ویدیوی کامل را تماشا کنید که تعلیق مغناطیسی نیکولایف را نشان می دهد. این ویدیو صدها نفر از علاقه مندان را در روسیه و خارج از کشور وادار کرد تا ساختاری بسازند که بتواند بدون توقف شناور ایجاد کند. اما متاسفانه در حال حاضر ایجاد نشده است طراحی کارچنین تعلیقی این موضوع مدل نیکولایف را مورد تردید قرار می دهد.
برای آزمایش دقیقاً همین طرح ساخته شد. علاوه بر تمام موارد افزودنی، همان آهنرباهای فریت مانند نیکولایف عرضه شد. آنها ضعیف تر از نئودیمیم هستند و با چنین چیزی بیرون نمی روند قدرت عظیم. اما آزمایش در یک سری آزمایش تنها ناامیدی به همراه داشت. متأسفانه، این طرح نیز ناپایدار بود.
نتیجه.
مشکل این است که آهنرباهای حلقوی، مهم نیست که چقدر قوی هستند، نمی توانند محور یاتاقان را با نیروی وارده از آهنرباهای رانش جانبی که برای تثبیت جانبی آن لازم است، متعادل نگه دارند. اکسل به سادگی با کوچکترین حرکتی به طرفین می لغزد. به عبارت دیگر، نیرویی که با آن آهنرباهای حلقه ای محور را در درون خود تثبیت می کنند، همیشه وجود خواهد داشت قدرت کمتربرای تثبیت محور در جهت جانبی ضروری است.
پس نیکولایف چه چیزی را نشان داد؟ اگر با دقت بیشتری به این ویدیو نگاه کنید، مشکوک می شوید که به دلیل کیفیت پایین ویدیو، نقطه توقف سوزن به سادگی قابل مشاهده نیست. آیا تصادفی است که نیکولایف سعی می کند جالب ترین چیزها را نشان دهد؟ در اینجا امکان معلق شدن مطلق بر روی آهنرباهای دائمی رد نمی شود. شاید آنها هنوز شکلی از آهنربا را ایجاد نکرده اند که پتانسیل چاهی لازم را ایجاد کند که به طور قابل اعتماد دسته ای از آهنرباهای دیگر را در تعادل پایدار نگه دارد.
در زیر نموداری از سیستم تعلیق مغناطیسی آورده شده است
 رسم تعلیق مغناطیسی با آهنرباهای دائمی
رسم تعلیق مغناطیسی با آهنرباهای دائمی 
اصل عملکرد آن مبتنی بر استفاده از نیرویی است که بر روی هادی حامل جریان قرار می گیرد که در میدان مغناطیسی قرار می گیرد. هادی حامل جریان می تواند جامد یا مایع باشد. در حالت دوم، ساپورت ها نامیده می شوند
نوع هدایت مغناطیسی هیدرودینامیکی بسته به نوع جریان، تعلیق های هدایتی به تعلیق تقسیم می شوند جریان مستقیمو جریان متناوب (میدان مغناطیسی و جریان باید در فاز باشند).
تعلیق هدایت نشان داده شده در شکل 1.2.5 دارای طراحی سادهو در عین حال ظرفیت بارگذاری بالایی دارد.
شکل 1.2.5 - تعلیق هدایت
یک اشکال قابل توجهی که استفاده از سیستم تعلیق رسانایی را محدود می کند، نیاز به تحریک جریان مستقیم روی بدنه معلق است که منجر به افزایش قابل توجه وزن خود و کاهش راندمان تعلیق می شود. یکی دیگر از معایب نیاز به منبع جریان بزرگ است.
اختصاص داده شده به تکیه گاه های رسانا مقدار کمی ازکار می کند، اما هنوز کاربرد گسترده ای پیدا نکرده اند. در حال حاضر، تعلیق هدایت در متالورژی (برای ذوب فلزات خالص) و حمل و نقل استفاده می شود.
سیستم تعلیق مغناطیسی فعال
تعلیق مغناطیسی فعال؟ قابل مدیریت است دستگاه الکترومغناطیسی، که قسمت چرخان ماشین (روتور) را در یک موقعیت معین نسبت به قسمت ثابت (استاتور) نگه می دارد.
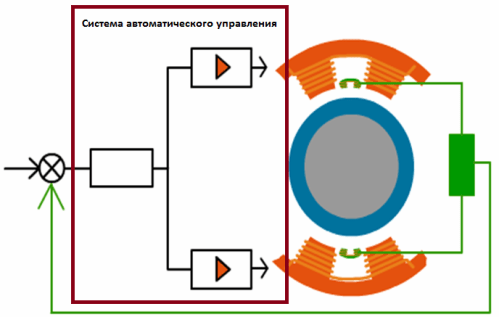
سیستم تعلیق مغناطیسی فعال به یک واحد بازخورد الکترونیکی ویژه نیاز دارد.
برای توضیح اصل عملکرد سیستم تعلیق مغناطیسی فعال، شکل 1.2.6 را در نظر بگیرید که ساده ترین حالت را نشان می دهد. طرح ساختاریتعلیق. این شامل یک سنسور است که جابجایی بدنه معلق را نسبت به موقعیت تعادل اندازه گیری می کند، یک تنظیم کننده که سیگنال اندازه گیری را پردازش می کند، یک تقویت کننده قدرت که از یک منبع خارجی تغذیه می شود که این سیگنال را به یک جریان کنترلی در سیم پیچ آهنربای الکتریکی تبدیل می کند. این سیگنال باعث ایجاد نیروهایی می شود که جسم فرومغناطیسی را نگه داشته و به حالت تعادل باز می گرداند.
مزیت آشکار مدارهای فعال، توانایی دستیابی به کنترل کارآمدتر میدان توزین و در نتیجه بهبود ویژگی های توان است. سیستم تعلیق فعال دارای ظرفیت بارگذاری بالا، استحکام مکانیکی بالا، طیف وسیعی از سفتی و میرایی، بدون صدا و لرزش، غیر قابل نفوذ در برابر آلودگی، بدون سایش، بدون نیاز به روغن کاری و غیره است. پایداری سیستم تعلیق و همچنین استحکام و میرایی لازم با انتخاب قانون کنترل حاصل می شود. از معایب سیستم تعلیق مغناطیسی فعال می توان به هزینه بالا، مصرف انرژی از منبع خارجی، پیچیدگی واحد کنترل الکترونیکی و غیره اشاره کرد.

شکل 1.2.6 - تعلیق مغناطیسی فعال
زمینه های مهم کاربرد بلبرینگ های مغناطیسی فعال عبارتند از: فناوری فضایی (پمپ های توربومولکولی خلاء)، تجهیزات پزشکی، فناوری در صنایع غذایی، سرعت بالا ترابری زمینیو غیره
پیشگفتار
عنصر اصلی بسیاری از ماشین ها روتور است که در تکیه گاه های بلبرینگ می چرخد. افزایش سرعت چرخش و توان ماشین های دوار با تمایل همزمان به کاهش جرم و ابعاد کلی، مشکل افزایش دوام واحدهای بلبرینگ را در اولویت قرار می دهد. علاوه بر این، در تعدادی از زمینه ها فن آوری پیشرفتهبلبرینگ هایی مورد نیاز است که بتوانند به طور قابل اعتماد در آن کار کنند شرایط شدید: در خلاء، در بالا و دمای پایین، فناوری های فوق العاده تمیز، در محیط های تهاجمی و غیره. ایجاد چنین بلبرینگ ها نیز یک مشکل فنی مبرم است.
راه حل این مشکلات را می توان با بهبود بلبرینگ های نورد و کشویی سنتی به دست آورد. و ایجاد بلبرینگ های غیر سنتی که از اصول فیزیکی متفاوتی برای عملکرد استفاده می کنند.
بلبرینگ های نورد و کشویی سنتی (مایع و گاز) اکنون به سطح فنی بالایی رسیده اند. با این حال، ماهیت فرآیندهای رخ داده در آنها محدود می کند و گاهی اوقات استفاده از این بلبرینگ ها را برای دستیابی به اهداف فوق غیرممکن می کند. بنابراین، معایب قابل توجه یاتاقان های غلتشی وجود تماس مکانیکی بین قطعات متحرک و ثابت و نیاز به روغن کاری مسیرهای مسابقه است. در یاتاقان های کشویی تماس مکانیکی وجود ندارد، بلکه یک سیستم دوره ای وجود دارد روان کنندهبرای ایجاد یک لایه روان کننده و آب بندی این لایه. بدیهی است که بهبود واحدهای آب بندی تنها می تواند باعث کاهش نفوذ متقابل روان کننده و نه به طور کامل شود. محیط خارجی.
یاتاقان هایی که از میدان های مغناطیسی و الکتریکی برای ایجاد واکنش های پشتیبانی استفاده می کنند، از این معایب عاری هستند. در میان آنها، یاتاقان های مغناطیسی فعال (AMP) بیشترین علاقه عملی را دارند. کار AMS بر اساس اصل شناخته شده تعلیق مغناطیسی فعال یک جسم فرومغناطیسی است: تثبیت بدن در یک موقعیت معین توسط نیروهای جاذبه مغناطیسی اعمال شده بر روی بدن از آهنرباهای الکترومغناطیسی کنترل شده انجام می شود. جریان در سیم پیچ آهنرباهای الکتریکی با استفاده از یک سیستم تشکیل می شود کنترل خودکار، متشکل از حسگرهای حرکت بدن، یک کنترل کننده الکترونیکی و تقویت کننده های قدرت که از یک منبع خارجی تغذیه می شوند انرژی الکتریکی.
اولین نمونه های استفاده عملی از تعلیق های مغناطیسی فعال در ابزارهای اندازه گیری به دهه 40 قرن بیستم بازمی گردد. آنها با نام های D. Beams و D. Hriesinger (ایالات متحده آمریکا) و O. G. Katsnelson و A. S. Edelstein (اتحادیه شوروی) مرتبط هستند. اولین یاتاقان مغناطیسی فعال در سال 1960 توسط R. Sixsmith (ایالات متحده آمریکا) پیشنهاد و مورد مطالعه قرار گرفت. وسیع استفاده عملی AMS در کشور ما و خارج از کشور از اوایل دهه 70 قرن بیستم شروع شد.
عدم وجود تماس مکانیکی و نیاز به روغن کاری در AMP ها آنها را در بسیاری از زمینه های فناوری بسیار امیدوار کننده می کند. اینها اول از همه عبارتند از: توربینها و پمپها در فناوری خلاء و برودتی. ماشین آلات برای فن آوری های فوق العاده تمیز و برای کار در محیط های تهاجمی؛ ماشین آلات و ابزار برای تاسیسات هسته ای و فضایی؛ طالع بینی; دستگاه های ذخیره انرژی اینرسی؛ و همچنین محصولات برای مهندسی مکانیک عمومی و ساخت ابزار - سنگ زنی و فرز دوک های پرسرعت، ماشین آلات نساجی. سانتریفیوژها، توربین ها، ماشین های متعادل کننده، پایه های ارتعاشی، ربات ها، دقیق ابزار اندازه گیریو غیره.
با این حال، علیرغم این موفقیت ها، AMJI ها در عمل بسیار کندتر از پیش بینی های انجام شده در اوایل دهه 1970 اجرا می شوند. اول از همه، این با پذیرش کند صنعت از نوآوری ها، از جمله AMP توضیح داده می شود. مانند هر نوآوری، برای اینکه AMP ها مورد تقاضا باشند، باید محبوب شوند.
متأسفانه، در زمان نگارش این سطور، تنها یک کتاب به یاتاقان های مغناطیسی فعال اختصاص داده شده است: G. Schweitzer. N. Bleulerand A. Traxler “Active magnetic bearings”, ETH Zurich, 1994, 244 p., منتشر شده به زبان انگلیسی و آلمانی. این کتاب با حجم کم، در درجه اول برای خواننده ای است که اولین گام ها را در درک مشکلاتی که هنگام ایجاد یک AMP به وجود می آید برمی دارد. نویسندگان با ایجاد خواستههای بسیار معتدلی از پیشینه مهندسی و ریاضی خواننده، ایدهها و مفاهیم اصلی را به ترتیب متفکرانهای ترتیب میدهند که به یک مبتدی اجازه میدهد به راحتی سرعت خود را بالا ببرد و از نظر مفهومی بر یک حوزه جدید تسلط یابد. بیتردید این کتاب پدیدهای قابل توجه است و نمیتوان نقش محبوبکننده آن را دستکم گرفت.
خواننده ممکن است بپرسد که آیا ارزش نوشتن یک تک نگاری واقعی را داشته و خود را به ترجمه هر یک از زبان روسی کتاب ذکر شده در بالا محدود نکنیم. اولاً از سال 1992 از من برای ارائه سخنرانی در مورد AMS در دانشگاه های روسیه دعوت شد. فنلاند و سوئد از این سخنرانی ها یک کتاب رشد کرد. ثانیا، بسیاری از همکاران من تمایل به دریافت کتابی در مورد LMP، که برای توسعه دهندگان ماشین های دارای AMP نوشته شده است، ابراز کردند. سوم، من همچنین متوجه شدم که بسیاری از مهندسانی که در زمینه AMP تخصص ندارند، به کتابی نیاز دارند که جسم کنترلی یک آهنربای الکتریکی را بررسی کند.
هدف این کتاب تجهیز مهندسان به روشهای مدلسازی ریاضی، سنتز و تجزیه و تحلیل AMP و در نتیجه کمک به تحریک علاقه در این زمینه است. منطقه جدیدفن آوری. شک ندارم که این کتاب برای دانشجویان بسیاری از تخصصهای فنی، بهویژه در طول دوره و طراحی دیپلم مفید خواهد بود. هنگام نگارش این کتاب، به عنوان مدیر علمی آزمایشگاه تحقیقاتی پشتیبانی های مغناطیسی در موسسه پلی تکنیک Pskov دانشگاه فنی دولتی سنت پترزبورگ، به 20 سال تجربه در زمینه AMP اعتماد کردم.
کتاب شامل 10 فصل است. فصل 1 می دهد توضیح کوتاههر کس انواع ممکنتعلیق های الکترومغناطیسی که هدف آن ها گسترش افق های خواننده است. فصل 2، با هدف کاربران AMP ها، خواننده را با فناوری بلبرینگ های مغناطیسی فعال آشنا می کند - تاریخچه توسعه، طراحی ها، ویژگی ها، مشکلات توسعه و چندین نمونه از کاربردهای عملی. فصل 3 و 4 روشی برای محاسبه مدارهای مغناطیسی یاتاقان ارائه می کند. یک آهنربای الکتریکی به عنوان یک جسم کنترلی در فصل 5 مورد مطالعه قرار می گیرد. در فصل 6، مشکلات سنتز کنترل کننده و تجزیه و تحلیل دینامیک یک سیستم تعلیق مغناطیسی تک توانی حل شده است. این فصل در مورد نحوه کنترل گیمبال و آنچه می تواند شما را از دستیابی به کیفیت های دینامیکی مورد نیاز باز دارد است. مکان مرکزی توسط فصل 7 اشغال شده است که به بررسی مشکلات کنترل تعلیق یک روتور صلب با پنج درجه آزادی می پردازد، تعامل سیستم تعلیق و موتور محرک را بررسی می کند و همچنین به موضوع ایجاد ماشین های الکتریکی بدون پایه می پردازد. تاثیر تغییر شکل های خمشی الاستیک روتور بر دینامیک گیمبال در فصل 8 مورد بحث قرار گرفته است. فصل 9 به کنترل دیجیتال گیمبال اختصاص دارد. فصل پایانی 10 تعدادی از جنبه های دینامیکی مرتبط با اجرای آویز روتور در AMP ها را بررسی می کند.
با توجه به فهرست منابع در پایان کتاب، من سعی نکرده ام همه مقالات تاریخی قابل توجه در AMP را درج کنم و از آن دسته از محققانی که به سهم آنها در این زمینه اشاره نشده است پوزش می خواهم.
از آنجایی که دامنه مسائل بسیار گسترده است، ثابت شد که حفظ یک سیستم غیرممکن است نمادهادر سراسر کتاب با این حال، هر فصل استفاده می کند سیستم دائمینشانه گذاری.
من از معلمانم، استادان دیوید راخمیلویچ مرکن و آناتولی ساولونچ کلزون سپاسگزارم - آنها کمک زیادی به ظهور این کتاب کردند. مایلم از همکارانم در آزمایشگاه پشتیبانی مغناطیسی و دانشگاه، به ویژه فدور جورجیویچ کوچوین، میخائیل وادیموویچ آفاناسیف تشکر کنم. والنتین واسیلیویچ آندرین، سرگئی ولادیمیرویچ اسمیرنوف، سرگئی گنادیویچ استبیخوف و ایگور ایوانوویچ موروزوف، که با تلاش آنها ماشین های بسیاری با AMP ایجاد شد. گفتگوها و کار مشترک با پروفسور کمیل شمسودنوویچ خوجین و دانشیاران ولادیمیر الکساندرویچ آندریف، والری جورجیویچ بوگوف و ویاچسلاو گریگوریویچ ماتسویچ نیز برای من مفید بود. من همچنین می خواهم از مشارکت دانشجویان فارغ التحصیل و دانشجویان فارغ التحصیل که با اشتیاق فراوان در زمینه AMP با من کار کردند - اینها گریگوری میخائیلوویچ کرایزمن، نیکولای وادیموویچ خمیلکو، آرکادی گریگوریویچ خروستیسکی، نیکولای میخایلوویچ ایلیینوویچ و الکساندر میخائیلوویچ، الکساندر میخائیلوویچ کرایزمن، نیکولای وادیموویچ خمیلکو، آرکادی گریگوریویچ خروستیتسکی، نیکولای میخایلوویچ ایلینوویچ و الکساندر میخائیلوویچ و الکساندر میخیلوویچ میلکو هستند قدردانی کنم. واسیلیویچ کیسلف. کمک فنی ارائه شده توسط النا ولادیمیرونا ژوراولووا و آندری سمنوویچ لئونتیف در تهیه نسخه خطی برای انتشار شایسته ذکر ویژه است.
مایلم از شرکت مهندسی پسکوف و موسسه پلی تکنیک اسکوف به خاطر کمک هایشان در تامین مالی انتشار کتاب تشکر کنم.
در مورد یاتاقان های مغناطیسی یا تعلیق های غیر تماسی، نمی توان به ویژگی های قابل توجه آنها اشاره کرد: نیازی به روغن کاری نیست، قطعات سایشی وجود ندارد، بنابراین هیچ تلفات اصطکاک، سطح ارتعاش بسیار کم، سرعت نسبی بالا، مصرف برق کم، خودکار سیستم کنترل و نظارت بر وضعیت بلبرینگ ها، قابلیت آب بندی.
تمام این مزایا باعث ایجاد بلبرینگ های مغناطیسی می شود بهترین راه حل هابرای بسیاری از کاربردها: برای توربین های گاز، برای تجهیزات برودتی، در ژنراتورهای الکتریکی پرسرعت، برای دستگاه های خلاء، برای ماشین آلات مختلف و تجهیزات دیگر، از جمله با دقت بالا و سرعت بالا (حدود 100000 دور در دقیقه)، که در آن عدم وجود مکانیکی تلفات، تداخل و خطا مهم است.
اساساً یاتاقان های مغناطیسی به دو نوع یاتاقان مغناطیسی غیرفعال و فعال تقسیم می شوند. یاتاقان های مغناطیسی غیرفعال تولید می شوند، اما این روش بسیار ایده آل نیست، بنابراین بسیار به ندرت استفاده می شود. با یاتاقانهای فعال، که در آن یک میدان مغناطیسی ایجاد میشود، امکانات فنی انعطافپذیرتر و گستردهتر باز میشود. جریان های متناوبدر سیم پیچی هسته ها
یاتاقان مغناطیسی بدون تماس چگونه کار می کند؟
عملکرد یک تعلیق یا بلبرینگ مغناطیسی فعال بر اساس اصل شناور الکترومغناطیسی - شناور با استفاده از میدان های الکتریکی و مغناطیسی است. در اینجا چرخش شفت در بلبرینگ بدون تماس فیزیکی سطوح با یکدیگر اتفاق می افتد. به همین دلیل است که روانکاری به طور کامل حذف می شود، اما سایش مکانیکی با این وجود وجود ندارد. این امر قابلیت اطمینان و کارایی ماشین ها را افزایش می دهد.
کارشناسان همچنین به اهمیت نظارت بر موقعیت محور روتور اشاره می کنند. یک سیستم حسگر به طور مداوم موقعیت شفت را کنترل می کند و با تنظیم موقعیت، سیگنال هایی را به سیستم کنترل خودکار برای موقعیت یابی دقیق ارسال می کند. میدان مغناطیسیاستاتور - نیروی جاذبه در سمت مورد نظر شفت با تنظیم جریان در سیم پیچ های استاتور یاتاقان های فعال قوی تر یا ضعیف تر می شود.

دو یاتاقان فعال مخروطی یا دو یاتاقان فعال شعاعی و یک محوری به روتور اجازه میدهند که به معنای واقعی کلمه در هوا بدون تماس معلق شود. سیستم کنترل گیمبال به طور مداوم کار می کند و می تواند دیجیتال یا آنالوگ باشد. این امر استحکام نگهداری بالا، ظرفیت بارگذاری بالا و سفتی قابل تنظیم و جذب ضربه را تضمین می کند. این تکنولوژیاجازه می دهد تا یاتاقان ها در کم و دمای بالا، در خلاء، در سرعت های بالا و در شرایط افزایش نیاز به عقیمی.
از مطالب فوق مشخص می شود که قسمت های اصلی سیستم تعلیق مغناطیسی فعال عبارتند از: یاتاقان مغناطیسی و سیستم اتوماتیک کنترل الکترونیکی. الکترومغناطیس به طور مداوم بر روی روتور با طرف های مختلف، و عمل آنها منوط به سیستم کنترل الکترونیکی است.

روتور یک یاتاقان مغناطیسی شعاعی مجهز به صفحات فرومغناطیسی است که توسط یک میدان مغناطیسی نگهدارنده از سیم پیچ های استاتور بر روی آنها تأثیر می گذارد و در نتیجه روتور بدون تماس با آن در مرکز استاتور معلق می شود. سنسورهای القایی به طور مداوم موقعیت روتور را کنترل می کنند. هر گونه انحراف از موقعیت صحیح منجر به ارسال سیگنال به کنترلر می شود تا به نوبه خود روتور را به موقعیت مورد نظر برگرداند. فاصله شعاعی می تواند از 0.5 تا 1 میلی متر باشد.
یک یاتاقان رانش مغناطیسی به روشی مشابه عمل می کند. الکترومغناطیس هایی به شکل حلقه به محور دیسک رانش متصل می شوند. الکترومغناطیس ها روی استاتور قرار دارند. سنسورهای محوری در انتهای شفت قرار دارند.
برای نگه داشتن مطمئن روتور دستگاه در هنگام توقف یا در لحظه خرابی سیستم نگهدارنده، از بلبرینگ های ایمنی استفاده می شود که به گونه ای ثابت می شوند که شکاف بین آنها و شفت تنظیم شود. برابر با نصفآنچه در یک یاتاقان مغناطیسی اتفاق می افتد.
سیستم تنظیم خودکاردر کابینت قرار دارد و مسئول مدولاسیون صحیح جریان عبوری از آهنرباهای الکتریکی مطابق با سیگنال های سنسورهای موقعیت روتور است. قدرت تقویت کننده ها به حداکثر قدرت مغناطیس های الکتریکی، اندازه شکاف هوا و زمان واکنش سیستم به تغییرات در موقعیت روتور مربوط می شود.
قابلیت های یاتاقان های مغناطیسی بدون تماس
حداکثر سرعت چرخش ممکن روتور در یک یاتاقان مغناطیسی شعاعی تنها با توانایی صفحات روتور فرومغناطیسی در مقاومت در برابر نیروی گریز از مرکز محدود می شود. به طور معمول محدودیت سرعت محیطی 200 متر بر ثانیه است، در حالی که برای یاتاقان های مغناطیسی محوری این محدودیت توسط دوام فولاد ریخته گری رانش محدود می شود - 350 متر بر ثانیه با مواد معمولی.
حداکثر باری که یک یاتاقان با قطر مناسب و طول استاتور می تواند تحمل کند بستگی به فرومغناطیس مورد استفاده دارد. برای مواد استانداردحداکثر فشار 0.9 نیوتن بر سانتیمتر مربع است که کمتر از یاتاقانهای تماسی معمولی است، با این حال، افت بار را میتوان با سرعت بالای محیطی با افزایش قطر شفت جبران کرد.
مصرف انرژی یک یاتاقان مغناطیسی فعال خیلی زیاد نیست. بیشترین تلفات در بلبرینگ به دلیل جریان های گردابی رخ می دهد، اما این ده ها برابر کمتر از انرژی است که هنگام استفاده از یاتاقان های معمولی در ماشین ها تلف می شود. کوپلینگ ها، موانع حرارتی و سایر دستگاه ها حذف می شوند، یاتاقان ها در شرایط خلاء، هلیوم، اکسیژن، آب دریا و غیره به طور موثر عمل می کنند. محدوده دما از -253 درجه سانتیگراد تا +450 درجه سانتیگراد است.
معایب نسبی بلبرینگ های مغناطیسی
در این میان بلبرینگ های مغناطیسی معایبی نیز دارند.
اول از همه، نیاز به استفاده از غلتک های ایمنی کمکی وجود دارد که می توانند حداکثر دو شکست را تحمل کنند و پس از آن باید با موارد جدید جایگزین شوند.
ثانیاً پیچیدگی سیستم کنترل خودکار که در صورت خرابی به تعمیرات پیچیده نیاز دارد.
ثالثاً، دمای سیمپیچ استاتور بلبرینگ در جریانهای زیاد افزایش مییابد - سیمپیچها گرم میشوند و نیاز به خنککننده شخصی، ترجیحاً خنککننده مایع دارند.
در نهایت، مصرف مواد یک یاتاقان غیر تماسی زیاد است، زیرا سطح یاتاقان باید گسترده باشد تا نیروی مغناطیسی کافی حفظ شود - هسته استاتور یاتاقان بزرگ و سنگین است. به علاوه پدیده اشباع مغناطیسی.

اما، با وجود معایب ظاهری، یاتاقان های مغناطیسی در حال حاضر به طور گسترده استفاده می شود، از جمله در سیستم های نوری با دقت بالا و سیستم های لیزری. به هر حال، از اواسط قرن گذشته، یاتاقان های مغناطیسی همیشه بهبود یافته اند.
کاربرد: برای پشتیبانی و وسط روتور یک دستگاه، به عنوان مثال کمپرسور، سوپرشارژر و غیره. ماهیت اختراع: تعلیق مغناطیسی روتور دستگاه شامل تکیه گاه های الکترومغناطیسی شعاعی و محوری است که در یک محفظه استوانه ای، بلوک های سنسورهای موقعیت روتور محوری و شعاعی، یک فلنج قابل جابجایی که روی محفظه نصب شده است تا موقعیت محوری یاتاقان ایمنی نصب شده در داخل فلنج را ثابت کند. تکیه گاه محوری به شکل دو استاتور با سیم پیچ کنترلی ساخته می شود که یکی از آنها به آن ثابت می شود دیوار داخلیبدنه، و دیگری روی دستگاه، و روتور ساخته شده به شکل دیسکی که بین آنها با شکاف نصب شده است. تکیه گاه شعاعی به شکل یک استاتور هم محور نصب شده بر روی محفظه و یک روتور نصب شده بر روی روتور دستگاه ساخته شده است. یک قسمت از سنسورهای موقعیت شعاعی و محوری روتور دستگاه بر روی یک عنصر مشترک نصب شده بر روی دیواره داخلی محفظه نصب شده است و قسمت دیگر در تعامل با آنها نیز بر روی یک عنصر مشترک ساخته شده به شکل بوش نصب شده است. یقه ای که روی روتور دستگاه قرار دارد. فلنج با سوراخ هایی برای دسترسی به حسگرهای موقعیت در هنگام تنظیم آنها ساخته شده است. 1 بیمار
این اختراع مربوط به مهندسی مکانیک، به ویژه تعلیق های مغناطیسی مورد استفاده در سیستم های مختلف الکترومکانیکی با سرعت بالا است و می تواند در ژیروسکوپ های ابزار، پمپ ها و غیره کاربرد داشته باشد. تعلیق مغناطیسی روتور یک الکترواسپیندل در بدنه مشترک الکترواسپیندل با روکش در دو طرف، همراه با یک موتور محرکه با سرعت بالا، یک سیستم تعلیق مغناطیسی متشکل از دو تکیه گاه مغناطیسی وجود دارد. اولین تکیه گاه مغناطیسی، واقع در سمت محوری که دیسک زمین روی آن ثابت شده است، شامل یک یاتاقان ایمنی فشرده شده بر روی قطر داخلی پوشش الکترواسپیندل، یک بلوک استاتور از سنسورهای موقعیت شعاعی روتور و یک استاتور آهنربای الکتریکی شعاعی با سیمپیچهای کنترلی است. در داخل محفظه قرار دارد. روتور اولین تکیه گاه مغناطیسی شامل یک محور الکترواسپیندل است که روتور واحد حسگر موقعیت روتور شعاعی و روتور الکترومغناطیس شعاعی بر روی آن فشار داده می شود. دومین تکیه گاه مغناطیسی، که در انتهای مخالف شفت قرار دارد، شامل، با شروع از کنار پوشش دوم محفظه الکترواسپیندل، یک یاتاقان ایمنی است که بر روی آن فشرده شده است. سطح داخلی روکش های دوک الکتریکی، استاتورهای دو الکترومغناطیس محوری U شکل با سیم پیچ های کنترلی واقع در داخل محفظه، سنسورهای موقعیت روتور محوری نصب شده بر روی سطح داخلی استاتورهای آهنربای الکتریکی محوری، استاتور بلوک سنسور موقعیت روتور شعاعی، استاتور الکترومغناطیس شعاعی با سیم پیچ های کنترلی . روتور دومین تکیه گاه مغناطیسی شامل یک محور الکترواسپیندل است که بر روی آن یک دیسک استوانه ای (روتور) از آهنرباهای الکتریکی محوری فشرده می شود که بین دو استاتور الکترومغناطیس محوری، روتور حسگرهای موقعیت شعاعی، روتور الکترومغناطیس شعاعی و روتور قرار دارد. از سنسورهای موقعیت محوری یک دیسک استوانه ای از آهنرباهای الکتریکی محوری است. در قسمت میانی محفظه الکترواسپیندل، یک استاتور موتور پرسرعت با یک سیم پیچ کنترلی بر روی سطح داخلی آن فشرده شده است و یک روتور موتور فشرده شده در قسمت میانی شفت الکترواسپیندل قرار دارد. این ترتیب همه اجزای الکترواسپیندل در یک محفظه واحد، جایگزینی آنها را پیچیده می کند، که شامل جداسازی دستگاه کار می شود. یک سیستم تعلیق مغناطیسی شناخته شده برای یک واحد پمپاژ گاز شامل یک محفظه استوانه ای با یک پوشش است که در سطح داخلی آن، با شروع از پوشش محفظه، یک فلنج با دو یاتاقان ایمنی فشرده به آن وجود دارد. دو استاتور از الکترومغناطیس های استوانه ای محوری از نوع Ш با سیم پیچ های کنترلی. استاتور واحد سنسور موقعیت شعاعی روتور؛ استاتور مغناطیس الکتریکی شعاعی با سیم پیچ کنترلی. یک سیلندر با یقه به فلنج تعلیق مغناطیسی در طرف پوشش وصل شده است که در آن سنسورهای موقعیت محوری روتور قرار دارند و سطوح کاری سنسورها عمود بر محور شفت است. استاتور واحد سنسور موقعیت شعاعی روتور و همچنین استاتور آهنربای الکتریکی شعاعی با تداخل در محفظه تعلیق مغناطیسی نصب می شوند. روتور تعلیق مغناطیسی شامل شفتی است که از انتهای آن شروع می شود، روتور سنسورهای موقعیت محوری، بوش یاتاقان های ایمنی، دیسک (روتور) آهنرباهای الکتریکی محوری، روتور بلوکی از سنسورهای موقعیت شعاعی روتور و روتور یک آهنربای الکتریکی شعاعی به صورت سری قرار دارند. در این تعلیق مغناطیسی، روتور سنسورهای موقعیت محوری یک بوش است که در انتهای شفت نصب شده است و روتور سنسورهای موقعیت شعاعی و آهنربای الکتریکی شعاعی در یک استوانه مشترک ساخته شدهاند. دیسک (روتور) آهنرباهای الکتریکی محوری با یک تداخل مناسب روی آستین نصب شده است که نسبت به شفت ثابت است. برای حذف جابجایی محوری، قطعات روتور در انتهای شفت با یک واشر قفل و یک مهره ثابت می شوند. بوش یاتاقان های ایمنی از تماس قسمت های استاتور و روتور تعلیق مغناطیسی در هنگام خاموش شدن جلوگیری می کند. با این حال، اگر آهنربای الکتریکی محوری واقع در پشت دیسک، یا حسگرهای موقعیت شعاعی روتور و سنسور محوری واقع در پشت دیسک، یا الکترومغناطیس شعاعی از کار بیفتد، به منظور جایگزینی آنها یا جایگزینی کل محفظه تعلیق مغناطیسی، برای برداشتن دیسک محوری، نصب شده با تداخل بر روی شفت، که به طور قابل توجهی جداسازی سریع سیستم تعلیق را پیچیده می کند، ضروری است. مونتاژ این تعلیق های مغناطیسی پس از جایگزینی قطعات خراب نیز با تعدادی از مشکلات همراه است: کاشت مجدددیسک روی شفت مورد نیاز است ترمیم مکانیکیهم سطح شفت و هم سطح فرود دیسک که زمان مونتاژ را افزایش میدهد و در ماشینهایی مانند واحدهای پمپ بنزین یا نوار نقالههای کارخانهای که دوکهای الکتریکی در آنها نصب شدهاند، توقف آنها فقط برای مدت کوتاهی مجاز است. علاوه بر این، زمانی که نصب مجدددیسک، سطح فعال آن خارج از تراز نسبت به سطوح فعال الکترومغناطیس های محوری نصب شده است که منجر به خراب شدن می شود. مشخصات فنی پشتیبانی محوری تعلیق مغناطیسی گاهی اوقات هنگام برداشتن دیسک از شفت، سطح فعال آن آسیب می بیند که نیاز به تعویض آن دارد و راه اندازی سیستم تعلیق مغناطیسی را پیچیده می کند. در سیستم تعلیق مغناطیسی فوق امکان تنظیم مکانیکی سنسورهای موقعیت روتور شعاعی وجود ندارد، زیرا هنگام نصب بر روی یک ماشین در حال اجرا در خارج از منطقه دسترسی قرار دارند. هدف از اختراع، توانایی تعویض سریع محفظه تعلیق مغناطیسی بدون جدا کردن روتور است. تعویض جزئی سریع واحدهای تعلیق مغناطیسی شکست خورده واقع در یک محفظه استوانه ای، بدون جداسازی روتور. تنظیم مکانیکی سنسورهای موقعیت روتور مشکل با این واقعیت حل می شود که در تعلیق مغناطیسی روتور یک دستگاه حاوی تکیه گاه های الکترومغناطیسی شعاعی و محوری واقع در یک محفظه استوانه ای، بلوک های سنسورهای موقعیت روتور محوری و شعاعی، یک فلنج قابل جابجایی نصب شده روی محفظه، یک یاتاقان ایمنی. و استاتورهای تکیه گاه شعاعی و استاتور اول تکیه گاه محوری، حاوی یک روتور دیسکی شکل که بین استاتور اول و دوم آن قرار دارد، همراه با سیم پیچ های کنترلی بر روی دیواره داخلی محفظه استوانه ای نصب شده است، با مشخصه این که استاتورها و روتور تکیه گاه محوری در سمت اتصال محفظه استوانه ای با بدنه دستگاه قرار دارد، به طوری که استاتور دوم آن ثابت است، سنسورهای موقعیت روتور محوری و شعاعی در سمت فلنج در ناحیه قرار دارند. اتصال دومی با بدنه استوانه ای شکل و یک قسمت از سنسورهای موقعیت محوری و شعاعی با امکان تنظیم بر روی المان مشترک نصب شده بر روی دیواره داخلی بدنه استوانه ای و قسمت دیگر نیز تعبیه شده است. روی یک عنصر مشترک که به صورت بوشینگ با یقه نصب شده بر روی روتور دستگاه ساخته شده است و فلنج با سوراخ های عبوری و یک پوشش قابل جابجایی ساخته شده است که یاتاقان ایمنی نصب شده در داخل فلنج را روی روتور دستگاه محکم می کند. نقشه تعلیق مغناطیسی پیشنهادی روتور دستگاه را نشان می دهد. این شامل یک بدنه استوانه ای 1 است که به صورت قابل جابجایی روی بدنه محصول نصب می شود. در سطح انتهایی محفظه، در مقابل سطح نصب محصول، یک فلنج با یک شانه (انتها) 2 وجود دارد که به شکل دو نیمه با سطح جداکننده در امتداد قطر ساخته شده است و دارای سوراخ هایی برای دسترسی به استاتور واحد حسگر یک پوشش یاتاقان ایمنی 3 به فلنج در طرف مقابل اتصال آن به بدنه تعلیق وصل شده است که روتور را از حرکات محوری نگه می دارد. در داخل محفظه، یک عنصر مشترک 4 به صورت سری نصب شده است که روی آن قسمت قابل تنظیم سنسورها برای موقعیت شعاعی و محوری روتور قرار دارد، استاتور یک آهنربای الکتریکی شعاعی با سیم پیچ های کنترلی 5، که در برابر یقه قرار دارد. سیلندر تعلیق مغناطیسی و ثابت از حرکات محوری توسط یک حلقه قفل 6، استاتور یکی از آهنرباهای الکتریکی محوری 7، رو به سطح فعال به سمت بدنه محصول. استاتور آهنربای الکتریکی محوری دوم 8 از طریق واشر غیر مغناطیسی 9 روی بدنه محصول ثابت می شود و در جهت مخالف آن رو به سطح فعال است. روتور تعلیق مغناطیسی شامل بخشی از شفت دستگاه 10 است که بر روی آن یک یاتاقان ایمنی 11 به طور متوالی با تداخل نصب شده است، در برابر یقه شفت قرار می گیرد و توسط یک مهره 12، قسمت مخالف سنسورهای موقعیت محوری و شعاعی ثابت می شود. 13، بر روی یک عنصر مشترک ساخته شده به شکل آستین با یقه ای که روی روتور دستگاه محکم شده است، به شانه شفت متصل شده و از حرکات محوری توسط یک حلقه قفل 14 ثابت شده است، بوش 15 با روتور الکترومغناطیس شعاعی ثابت شده است. 16 در آن فشار داده شده، در مقابل شانه شفت قرار گرفته و در جهت محوری توسط حلقه 17، آستین آداپتور 18، فشار دادن دیسک (روتور) آهنربای الکتریکی محوری 19، نصب شده با یک تداخل بر روی شفت، ثابت شده است، در مقابل یقه شفت قرار گرفته است. و بین دو استاتور آهنربای الکتریکی محوری قرار دارد. سیستم تعلیق مغناطیسی روتور دستگاه به شرح زیر عمل می کند. که در لحظه شروعزمان (روتور روی بلبرینگ های ایمنی قرار دارد)، لازم است روتور را در موقعیت مرکزی معلق کنید. برای انجام این کار، واحد الکترونیکی سیمپیچهای کنترلی آهنربای الکتریکی شعاعی 5 را با یک ولتاژ تغذیه تامین میکند که روتور را در موقعیت مرکزی نگه میدارد و آن سیمپیچهای کنترلی که نیروی الکترومغناطیسی ایجاد میکنند در جهت مخالف وزن روتور عمل میکنند. هنگامی که روتور بر اساس سیگنالهای سنسورهای موقعیت شعاعی از موقعیت مرکزی منحرف میشود، واحد الکترونیکی چنین ولتاژ تغذیهای را تولید میکند که به سیمپیچهای آهنربای الکتریکی شعاعی عرضه میشود، که برای بازگشت روتور به موقعیت مرکزی ضروری است. در جهت محوری، تعلیق مغناطیسی شبیه به حالت شعاعی عمل می کند، یعنی. هنگامی که روتور در جهت محوری حرکت می کند، واحد الکترونیکی بر اساس سیگنال های سنسورهای موقعیت محوری، چنین ولتاژ تغذیه ای را تولید می کند که به سیم پیچ های آهنرباهای الکتریکی محوری (7 و 8) عرضه می شود، که برای بازگشت روتور به مدار ضروری است. موقعیت مرکزی هنگامی که روتور در یک موقعیت مرکزی قرار دارد و بار اعمال می شود (هم محوری و هم شعاعی)، واحد الکترونیکی ولتاژ تغذیه ای را تولید می کند که به سیم پیچ های آهنربای الکتریکی متناسب با بار است تا روتور را در موقعیت مرکزی نگه دارد. هنگام کار با چنین سیستم تعلیق مغناطیسی، بیشترین آسیب پذیری واحدهای حامل جریان آن هستند که در محفظه قرار دارند: الکترومغناطیس های شعاعی و محوری، و همچنین سنسورهای موقعیت روتور، که سیم پیچ ها از کار می افتند. این به دلیل این واقعیت است که جریانهای زیادی از طریق سیمپیچهای کنترلی آهنربایهای الکتریکی در طول عملیات طولانیمدت جریان مییابند، به دلیل بارهای قابل توجهی که مغناطیسهای الکتریکی در حین کار درک میکنند، به عنوان مثال، دوکها با نیروی فشار زیاد هنگام آسیاب کردن یا در گاز. واحدهای پمپاژ با فشار بالا(فشار) گاز پمپاژ. در این شرایط عایق بندی واحدهای جریان رسان مختل شده و از کار می افتند که نیاز به تعویض مکرر آنها دارد. برای عیب یابی سریع اجزای حامل جریان تعلیق مغناطیسی، محفظه 1 را جایگزین کنید که در داخل آن یک عنصر 4 حاوی یکی از قسمت های سنسورهای قابل تنظیم برای موقعیت شعاعی و محوری روتور وجود دارد، استاتور مغناطیسی شعاعی با کنترل سیم پیچ 5، استاتور آهنربای الکترومغناطیسی محوری 7، پس از برداشتن پوشش یاتاقان ایمنی 3 و فلنج 2. برای جایگزینی جزئی واحدهای حامل جریان شکست خورده واقع در محفظه، به ویژه سنسورهای موقعیت روتور، استاتور آهنربای الکتریکی شعاعی، پوشش را بردارید. یاتاقان ایمنی 3، فلنج جمع شونده 2. اگر عنصر دارای سنسور 4 از کار افتاد، آن را بردارید و آن را با سنسور جدید جایگزین کنید، اگر استاتور آهنربای الکتریکی شعاعی با سیم پیچ های کنترلی 5 خراب شد، پس از برداشتن فلنج 2 و عنصر با سنسور 4، حلقه نگهدارنده 6 را بردارید و استاتور آهنربای الکتریکی شعاعی 5 با یک جدید جایگزین می شود. اگر الکترومغناطیس محوری 7 واقع در محفظه تعلیق مغناطیسی از کار افتاد، ابتدا پوشش یاتاقان ایمنی 3 و فلنج 2 را بردارید، سپس محفظه تعلیق مغناطیسی را از بدنه محصول جدا کنید. استاتور شکست خورده آهنربای الکتریکی 7 در محفظه تعلیق مغناطیسی 1 جایگزین می شود که دوباره به بدنه محصول وصل شده است. بنابراین، آرایش دو استاتور از آهنرباهای الکتریکی محوری با سیمپیچهای کنترلی و یک دیسک (روتور) در محفظه استوانهای تعلیق مغناطیسی در سمتی که آن را به بدنه محصول متصل میکند، امکان سریع تعویض کاملمحفظه تعلیق مغناطیسی، سریع تعویض جزئیواحدهای تعلیق مغناطیسی شکست خورده که در بدنه آن قرار دارند، بدون جداسازی روتور، و قرار گرفتن حسگرهای موقعیت روتور در مجاورت فلنج و دسترسی مستقیم به آنها از طریق سوراخ های این فلنج، تنظیم مکانیکی این سنسورهای موقعیت روتور را ممکن می کند. .
مطالبه
تعلیق مغناطیسی روتور دستگاه، حاوی تکیه گاه های الکترومغناطیسی شعاعی و محوری واقع در یک محفظه استوانه ای، بلوک های سنسورهای موقعیت روتور محوری و شعاعی، یک فلنج قابل جابجایی نصب شده روی محفظه، یک یاتاقان ایمنی، و یک استاتور پشتیبانی شعاعی و یک اولین استاتور تکیه گاه محوری حاوی یک روتور دیسکی شکل که بین استاتور اول و دوم آن قرار دارد همراه با سیم پیچ های کنترلی بر روی دیواره داخلی محفظه استوانه ای نصب می شود که مشخصه آن این است که استاتورها و روتور تکیه گاه محوری در سمتی قرار دارند. اتصال محفظه استوانه ای به بدنه دستگاه، به طوری که استاتور دوم آن به دومی ثابت شود، سنسورهای موقعیت محوری و شعاعی روتورها در سمت فلنج در ناحیه اتصال دومی با بدنه استوانه ای قرار دارند. و یک قسمت از سنسورهای موقعیت محوری و شعاعی با امکان تنظیم بر روی المان مشترک نصب شده بر روی دیواره داخلی بدنه استوانه ای و قسمت دیگر نیز بر روی المان مشترک ساخته شده به صورت آستین نصب شده است. یک یقه به روتور دستگاه متصل می شود و فلنج با سوراخ های عبوری و یک پوشش قابل جابجایی ساخته می شود که یاتاقان ایمنی نصب شده در داخل فلنج را روی روتور دستگاه ثابت می کند.